Rigid Body Physics
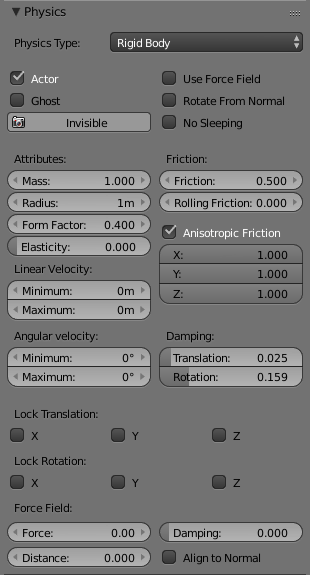
Rigid Body collision type in Physics tab.
It will give/receive collisions and react with a change in its velocity and its rotation. A rigid body ball would begin rotating and roll down (where a Dynamic ball would only hit and slide down the ramp).
The idea behind rigid body dynamics is that the mesh does not deform. If you need deformation you will need to either go to Soft Body or else fake it with animated Actions.
For more documentation, see the general physics page.
Options
- Actor
Enables detection by Near and Radar Sensors.
- Ghost
Disables collisions completely, similar to No collision.
- Invisible
Does not display, the same as setting the object to unrendered (such as unchecking the camera icon in the Outliner).
- Use Force Field
Materials can have physics settings on them as well: Friction, Elasticity, Force Field (positive or negative force), and also Dampening to other materials. When you turn on this checkbox, you are enabling the Material to exhibit this spring force.
- Rotate From Normal
Todo.
- No Sleeping
Prevents simulation meshes from sleeping. When an object has a linear velocity or angular velocity, it is in motion. It will detect collisions, receive gravity, etc. Once these thresholds are close to zero, it will cease these calculations – until another object interacts with it wake it up.
- Attributes
- Mass
Affects the reaction due to collision between objects – more massive objects have more inertia. Will also affect material force fields. Will also change behaviors if you are using the suspension and steering portions of Bullet physics.
- Radius
If you have the “Collision Bounds: Sphere” set explicitly (or implicitly through having the Collision Bounds subpanel unchecked), this will multiply with the Object’s (unapplied) Scale. Note that none of the other bounds types are affected. Also note that in the 3D View the display will show this for all types, even though it is only actually used with Sphere.
Basic
Radius= 1.5
Unapplied Scale
Applied Scale
Collision Bounds
Rolls, radius of 1 BU
Rolls, radius of 1.5 BU (after “popping” upward)
Rolls, radius of 1.5 BU
Rolls, radius of 1 BU (!)
Default (which is Sphere)
Slides, extent of 1 BU
Slides, extent of 1 BU
Slides, extent of 1 BU
Slides, extent of 1 BU
Box
“”
“”
“”
“”
Convex Hull
Slides, extent of 1 BU (but with more friction than above)
Slides, extent of 1 BU (but with more friction than above)
Acts insane
Slides extent of 1.5 BU
Triangle Mesh
- Form Factor
For affecting the Inertia Tensor. The higher the value, the greater the rotational inertia, and thus the more resistant to torque. You might think this is strange, considering Dynamic types do not have torque in response to collisions – but you can still see this value’s effects when you manually apply Torque.
- Elasticity
The elasticity of collisions determines how much of the kinetic energy is retained after the collision. A value of 1 will result in a collision where objects bounce off each other, and the kinetic energy after the collision is the same as before. A value of 0 will result in a collision where the objects stick together after the collision, as all energy will have been converted to heat (or other energy forms that Blender also does not model).
In macroscopic nature (so bigger than atomic particles) an elasticity of 1 is never seen, as at least some energy is converted to heat, sound, etc. An elastic (elasticity=high) collision occurs when two metal balls collide. An inelastic (elasticity=low) collision is seen when two half-inflated beach balls collide.
- Anisotropic Friction
Isotropic friction is identical at all angles. Anisotropic is directionally-dependent. Here you can vary the coefficients for the three axes individually, or disable friction entirely.
- Linear Velocity
Limit the linear speed of an object.
- Minimum
The object is allowed to be at complete rest, but as soon as it accelerates it will immediately jump to the minimum speed.
- Maximum
Top speed of the object.
- Angular Velocity
Limit the angular speed of an object.
- Minimum
Clamp angular velocity to this minimum speed (except when totally still), in angle per second.
- Maximum
Clamp angular velocity to this maximum speed, in angle per second.
- Damping
Increase the “sluggishness” of the object.
- Translation
Resist movement (0 - 1). At 1 the object is completely immobile.
- Rotation
Resist rotation, but not the kind of rotation that comes from a collision. For example, if a Motion Controller applies Torque to an object, this damping will be a factor.
- Lock Translation
Seize the object in the world along one or more axes. Note that this is global coordinates, not local or otherwise.
- Lock Rotation
Same as translation, but for rotation (also with respect to the global coordinates).
- Friction
Coulomb friction coefficient when inside the physics distance area.
- Force Field
Controls force field settings.
- Force
Upward spring force when inside the physics distance area.
- Distance
Distance of physics area.
- Damping
Damping of the spring force when inside the physics distance area.
- Align to Normal
Align dynamic game objects along the surface normal when inside the physics distance area.